Use of angular momentum in balance and stability of humanoid robots
|
A humanoid robot is said to possess linear stability if the external
forces sum up to a zero resultant force. Similarly, the robot is
considered rotationally stable if the resultant external forces
and moments, computed at its overall CoM (or, centroid), sum up to a zero moment.
According to a fundamental principle of mechanics, the resultant
external moment on a humanoid robot is equal to the rate of
change of its angular momentum. In other words, for a rotationally
stable humanoid robot, one that is not tipping over, the
centroidal angular momentum rate change is zero. The
angular momentum of the system is conserved.
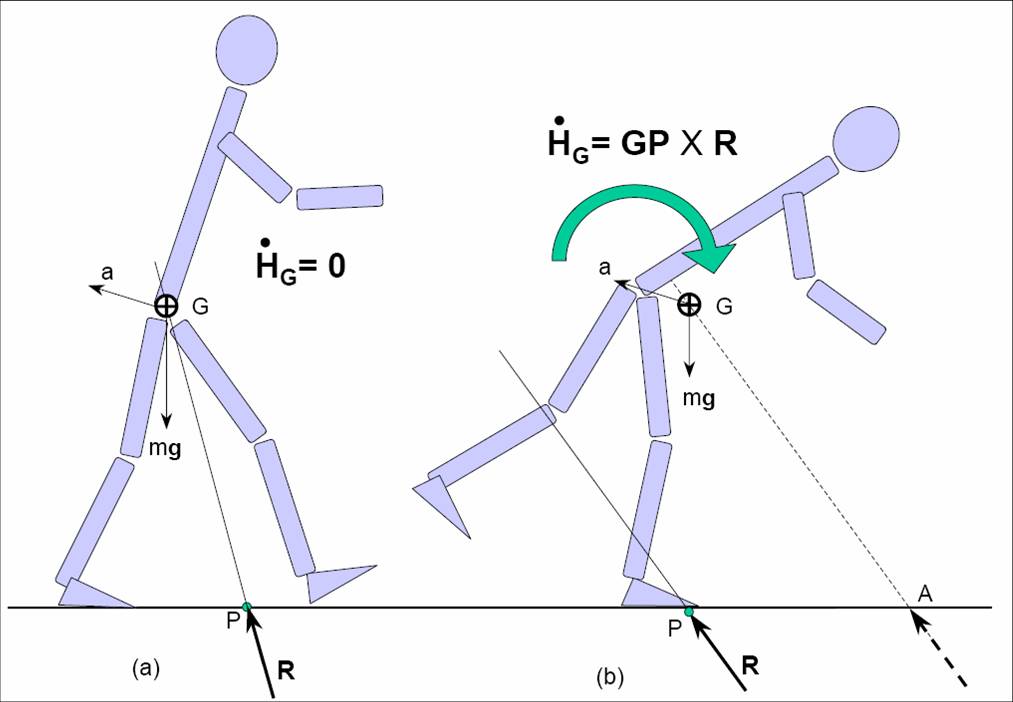
For a legged robot external force/moments may arise from gravity, ground contacts, additional contacts and interactions, or unexpected disturbances. The essence of our approach is schematically described in the figure below for a biped robot on a horizontal ground.
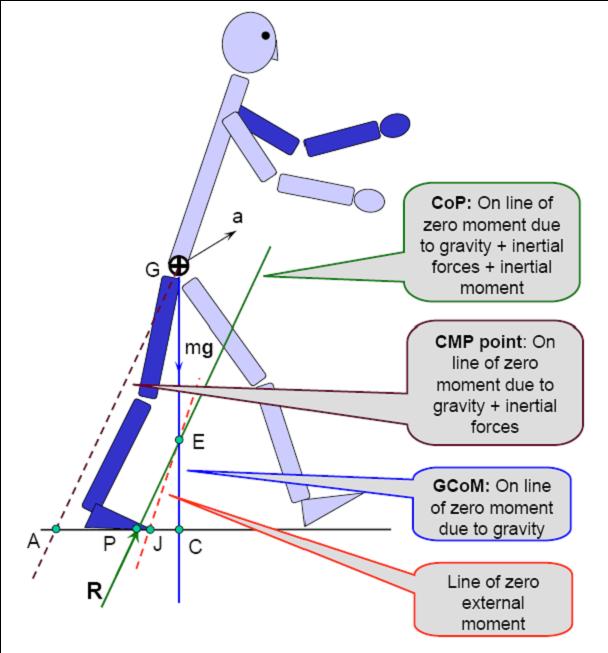
If the line of action of the GRF in Fig. b is linearly shifted, a time will come when the GRF will actually pass through the CoM. The point A on the ground through which this imaginary GRF now passes is called the centroidal moment pivot (CMP) point. The distance AP is a measure of rotational instability of the robot. Human beings do not have a direct control over GRF but must modulate it through dynamic coupling. This coupling is performed rather judiciously to take advantage of gravity. In normal walking, depending on the part of the gait cycle, the GRF may or may not pass through the CoM. There are interesting human movement examples, such as the take-off phase of forward running somersault, in which GRF is deliberately shifted to an off-centroid direction. This is useful in creating a large rotational instability which is what is precisely required for the task. Note that AP, the distance between CMP and CoP, is a measure of instability. It is meant to be primarily used as an analysis tool. It may be used as a control criteria with the following caveat. We, by no means, imply that to control CMP necessarily means to bring it to coincide with the CoP. In fact, a controller attempting to achieve this objective is likely to result in a rigid and restrictive gait. The fluidity of the human gait seems to come mostly from its cyclic regime of deliberate push to instability and a stability recapture. The following figure shows the relationships between a few ground reference points pertaining to the dynamics and balance of humanoid robots.
There is no difficulty in locating CMP for non-planar ground. Since CMP is the point of intersection of the GRF imagined to be passing through the robot CoM and the ground, the CMP definition is not inherently tied to a specific ground geometry. 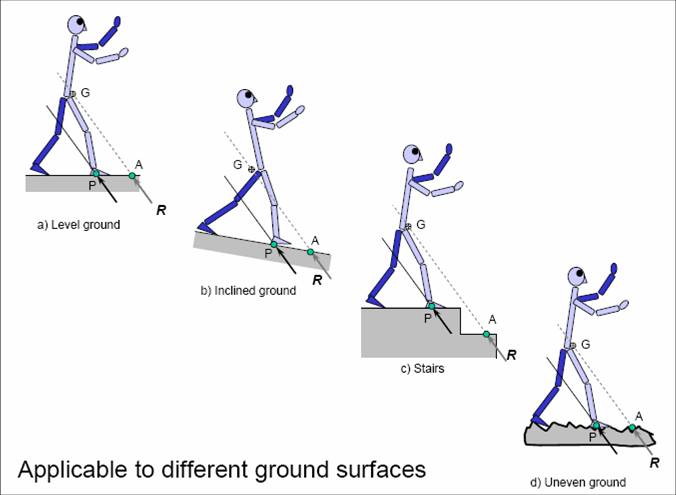
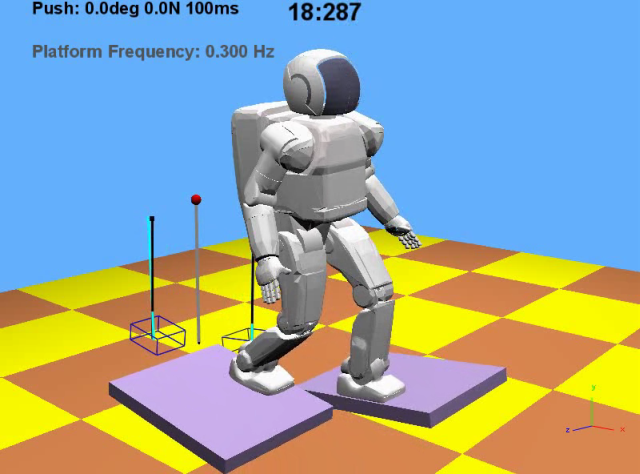
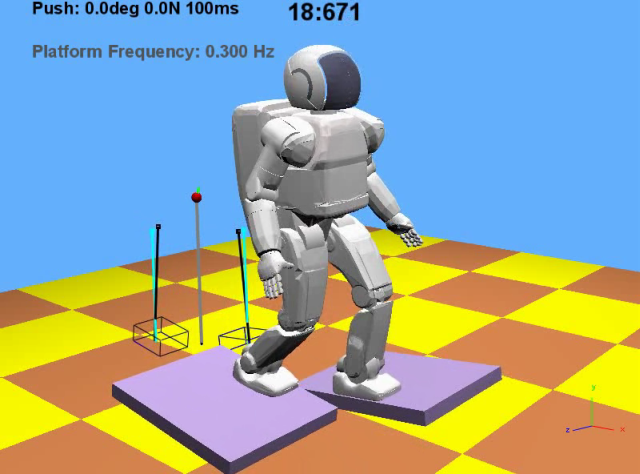
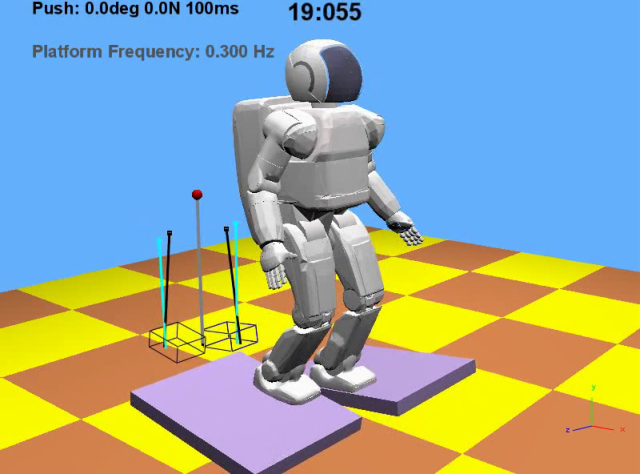
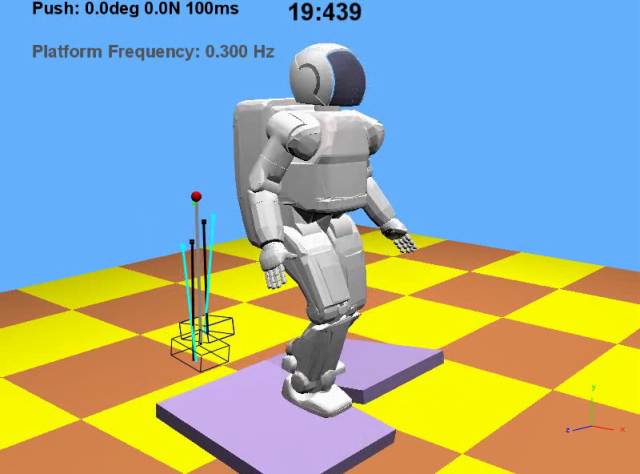
Angular momentum also enhances push recovery ability of a humanoid.
|