Simple humanoid models for balance and control
If you could reduce the instantaneous inertia of the entire humanoid
robot to that of a single rigid body, what would it be?
Simple models of complex dynamic systems are often instrumental in
our understaning of their essential behavior. Such models must
possess simplicity and compactness while not over-simplifying
the system.
The linear inverted pendulum model and a number of its variations
are frequently used in the gait and balance study of human
and humanoid robots. By focusing attentionto the fundamental
aspects of humanoid dynamics, such models open the way to new
classes of control laws, which would otherwise be difficult
or impossible to conceive.
While useful in their own right, a limitation of the above models is
that they represent the entire humanoid body only as a point mass
and do not characterize the significant centroidal moment of inertia
of the humanoid body. The centroidal moment
of inertia is a property of the distributed masses of the robot
limbs (head, arms, legs, etc) away from the CoM.
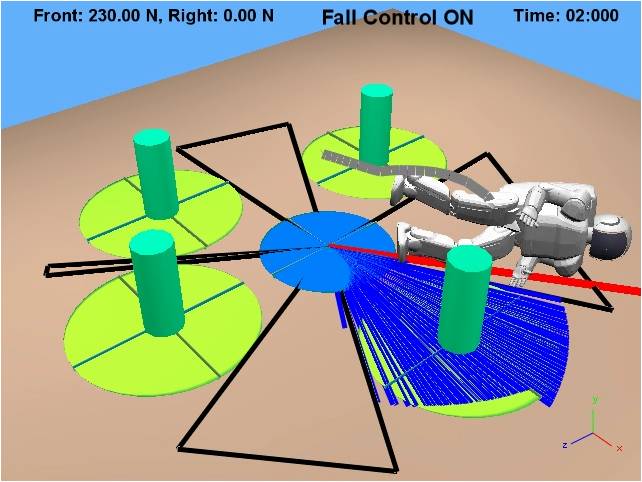
We study the Reaction Mass Pendulum (RMP), a reduced model version of the
complete humanoid robot. This model compactly captures the centroidal angular
momentum of the humanoid robot as a spinning ellipsoid which continuously
changes its shape, size and orientation.
We also introduce Inertia Shaping, a high-level approach to
modify the kinodyanmic properties of a humanoid.